Re-Upload for better visualization
Tiny-Touch NMPG This is a remix of my Tiny-Touch model. The NMPG appendix stands for "No Magnets, Pure Gravity" ;o) In order to achieve this, you have to print the parts with a layer height of 0.1 mm (or less). Here's a video of the 1st version in action on YouTube.
Changes made in V2 compared to V1:
- needs no magnets
- slimmer body / flag
- slotted mounting holes
- IR sensor cap added (optional)
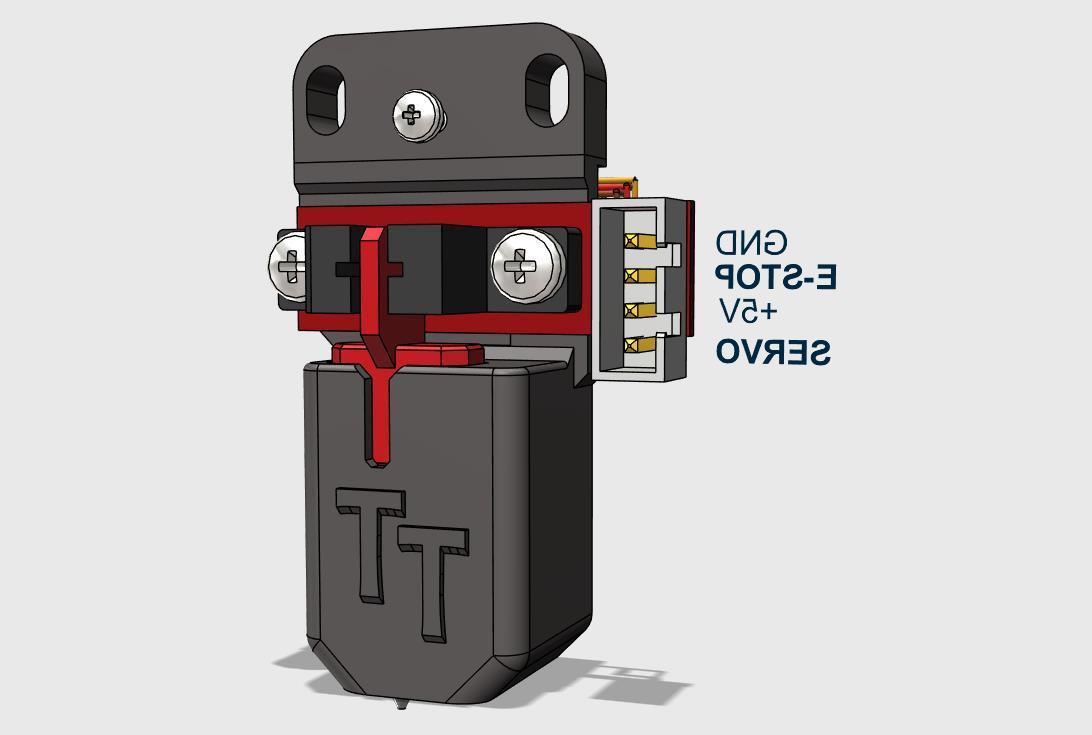
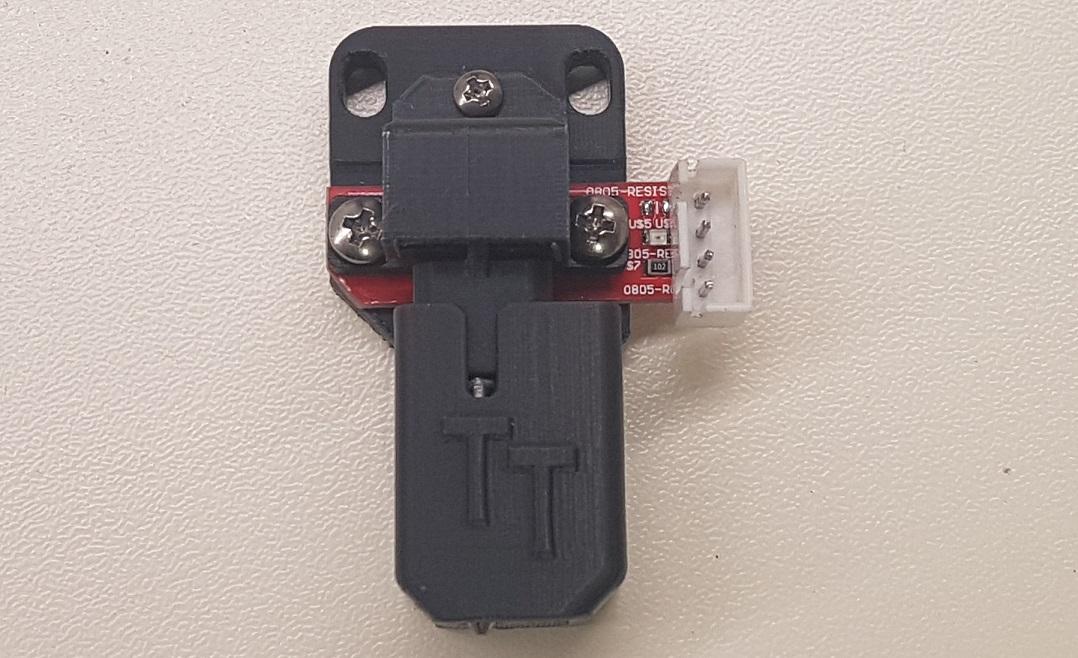
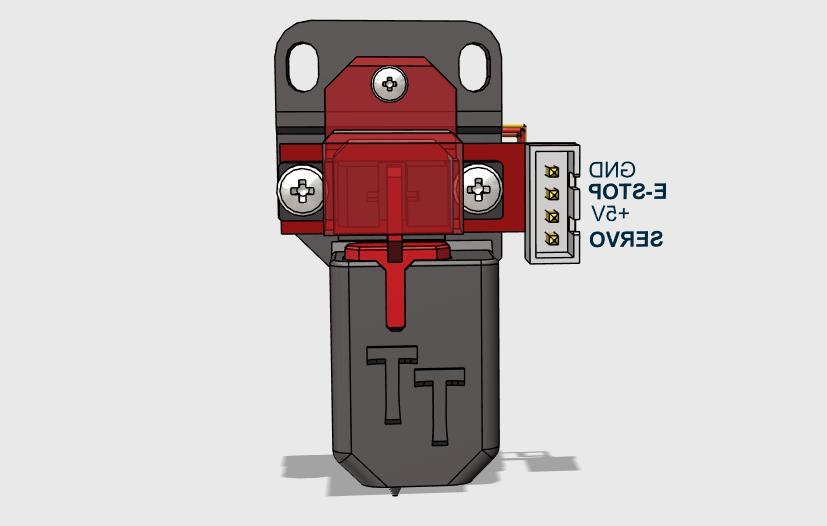
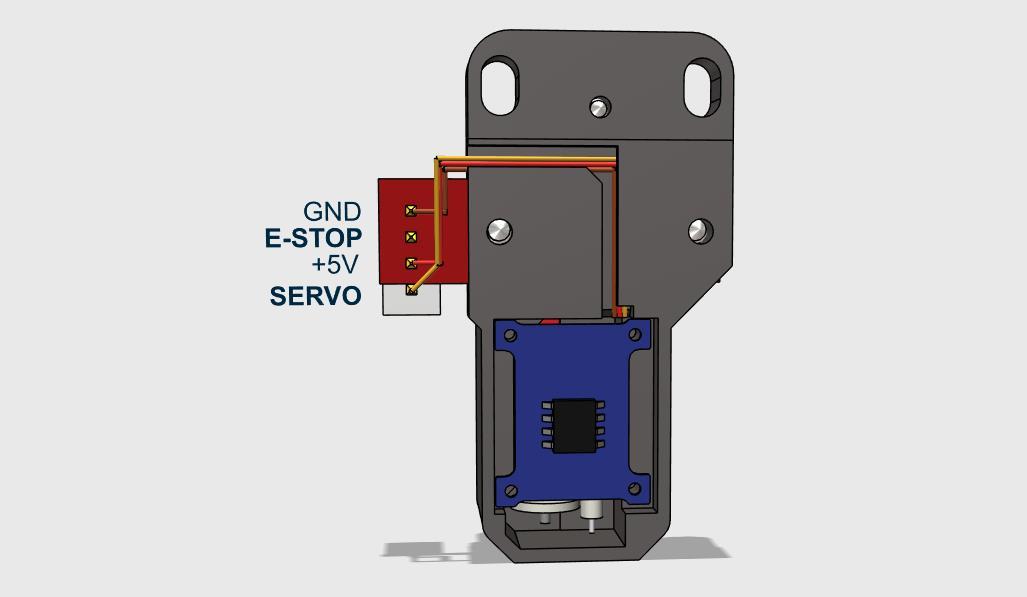
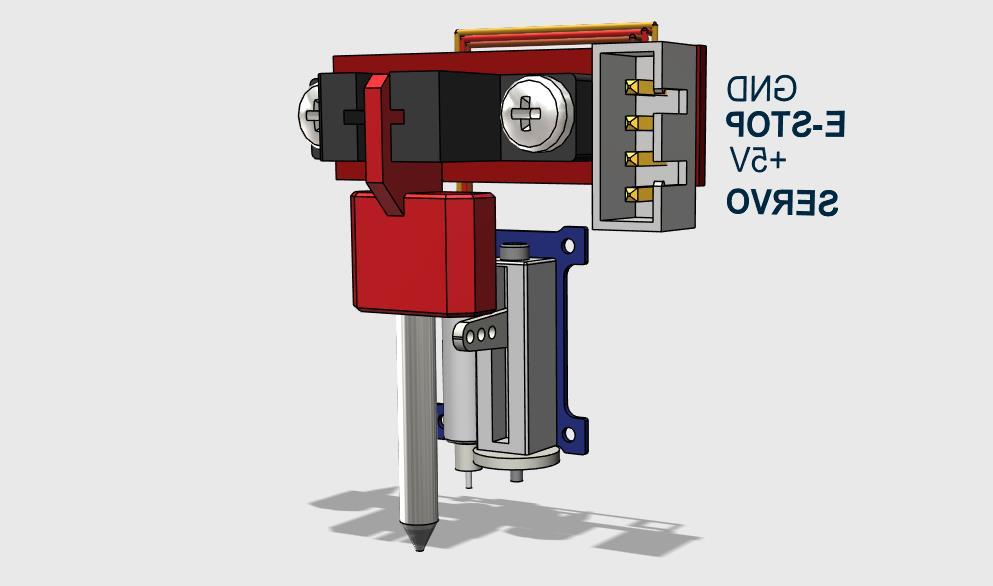
Wiring
The basic wiring is shown in [this picture] (https://drive.google.com/file/d/1PUr-svHrU30UUQ23uF6f7CsCJ9RxK8CM/view?usp=sharing). If you want to know more about logic level conversion, here's a nice article.
BOM
To build the Tiny-Touch you'll need:
- 1 x 5V linear nano servo like the Graupner Mosquito R or this (make sure it's "R" not "L")
- 1 x standard IR endstop like this one
- 1 x JST XH 4POS header like this one
- 1 x M3 x 25 mm bolt
- 2 x self tapping screws 2.9 x 9 mm
- 1 x self tapping screw 2.2 x 6.5 mm
- a couple of wires
Modders welcome
The STEP file is included for those who need to add a custom mount. Therefore, the upper part of the mount is separated in the STEP file and it also contains some variations.
Setting up Tiny-Touch for Marlin
If you want to set up Tiny-Touch on Marlin (2.x), don't use the BLTouch definitions! Here's a really nice how-to on reddit made by user cpxazn. The how-to originally describes the BFP-Touch sensor but it's the same as for Tiny-Touch. Skip the hardware section and go directly to the Firmware section of this write-up. The only difference in the setup is the definition of the servo angles for deploying / retracting the probe. For the BFP-Touch these values are:
#define Z_SERVO_ANGLES { 100, 155 }
Whereas for the Tiny-Touch you'll need:
#define Z_SERVO_ANGLES { 170, 20 }
Please follow the instructions step by step to the end and you'll be successful.