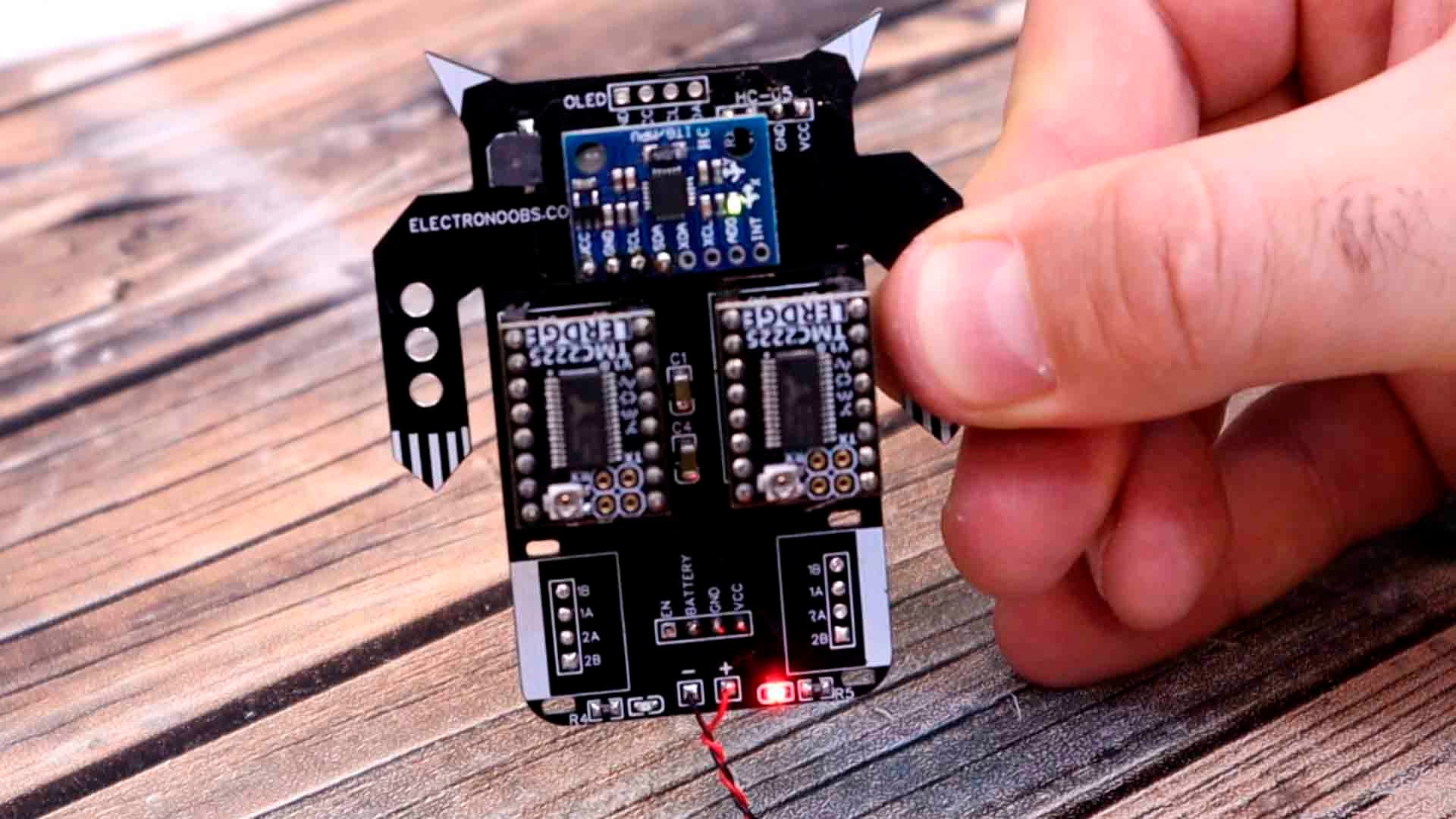








Balancing Robot Arduino NEMA17
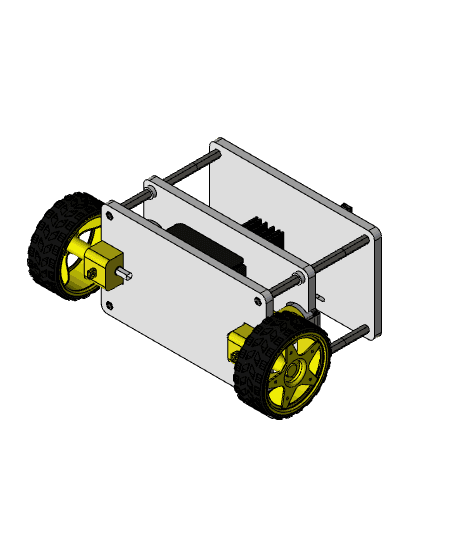
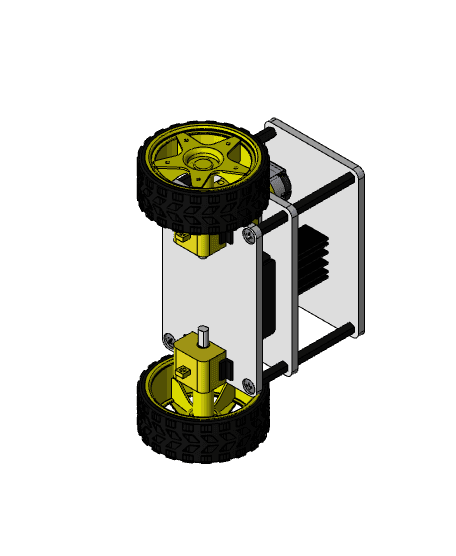
Hey guys. I know there are already a lot of balancing robot projects on the internet, but I wanted to make one as well. Actually, I wanted to make something special and make a mini balancing robot, but I kind of failed with the stepper motors and I will explain the problem in the video below. So what I’ve done in the end, is to use the same PCB I’ve prepared for a mini balancing robot, design a small 3D printed body and use bigger stepper motors and like that be able to finish my idea. The robot should get information from a homemade remote with Bluetooth connection and like that we could move around. But internally, the robot should also get information from an IMU module and calculate a PID value of the angle so it will never fall and always try to stay horizontal. That’s pretty interesting and I think you will learn a lot with this project because I will explain each step of the circuit but also the code. So what do you think, will this work? So let’s get started. Tutorial here: https://youtu.be/Gpm-TI21x9s
Balancing Robot Arduino NEMA17
Mini Balance Robot V2
Mini Balance Robot V1

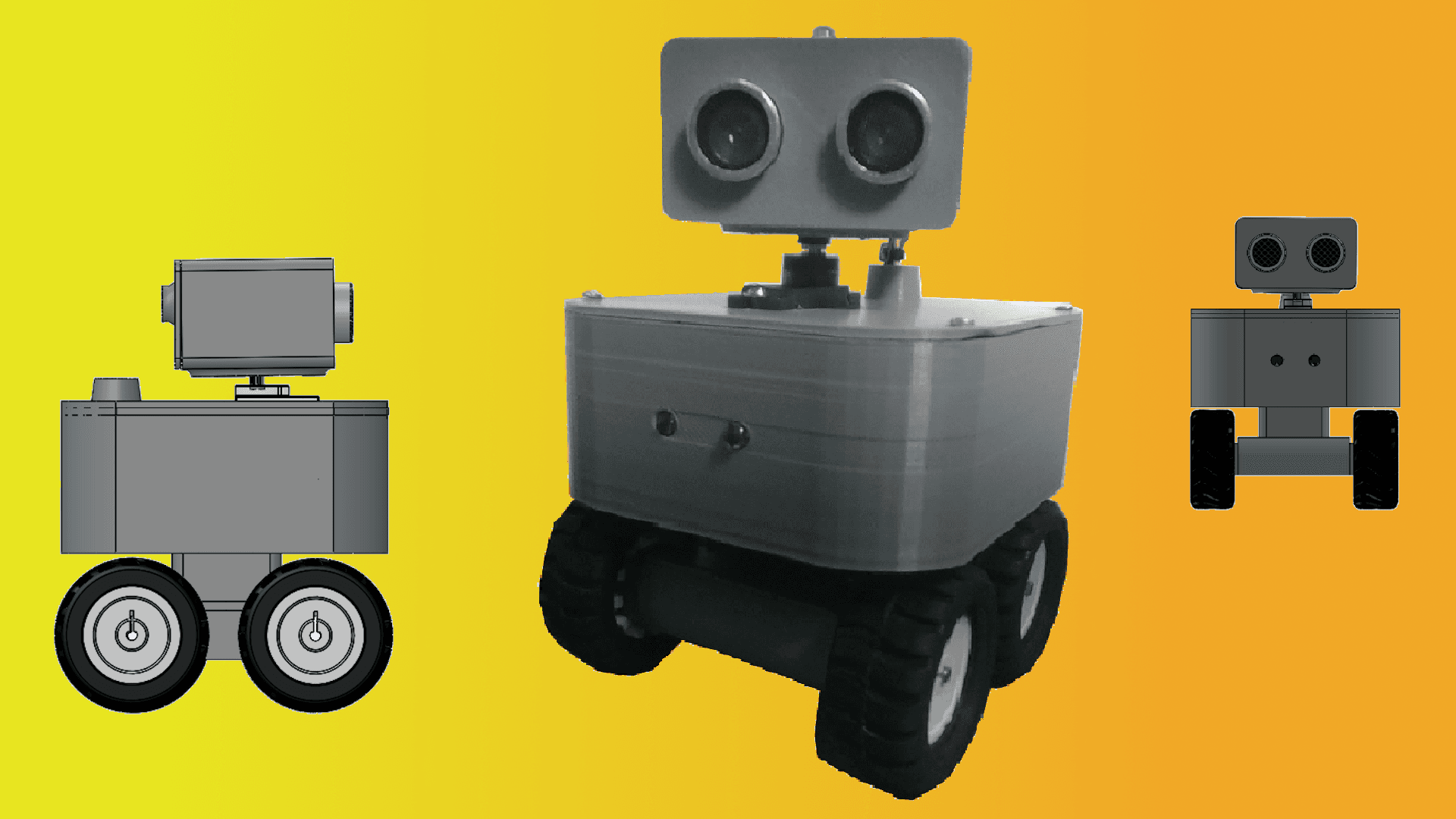
ROVER-T Arduino Robot

Hexapod Robot Arduino
Arduino Nano
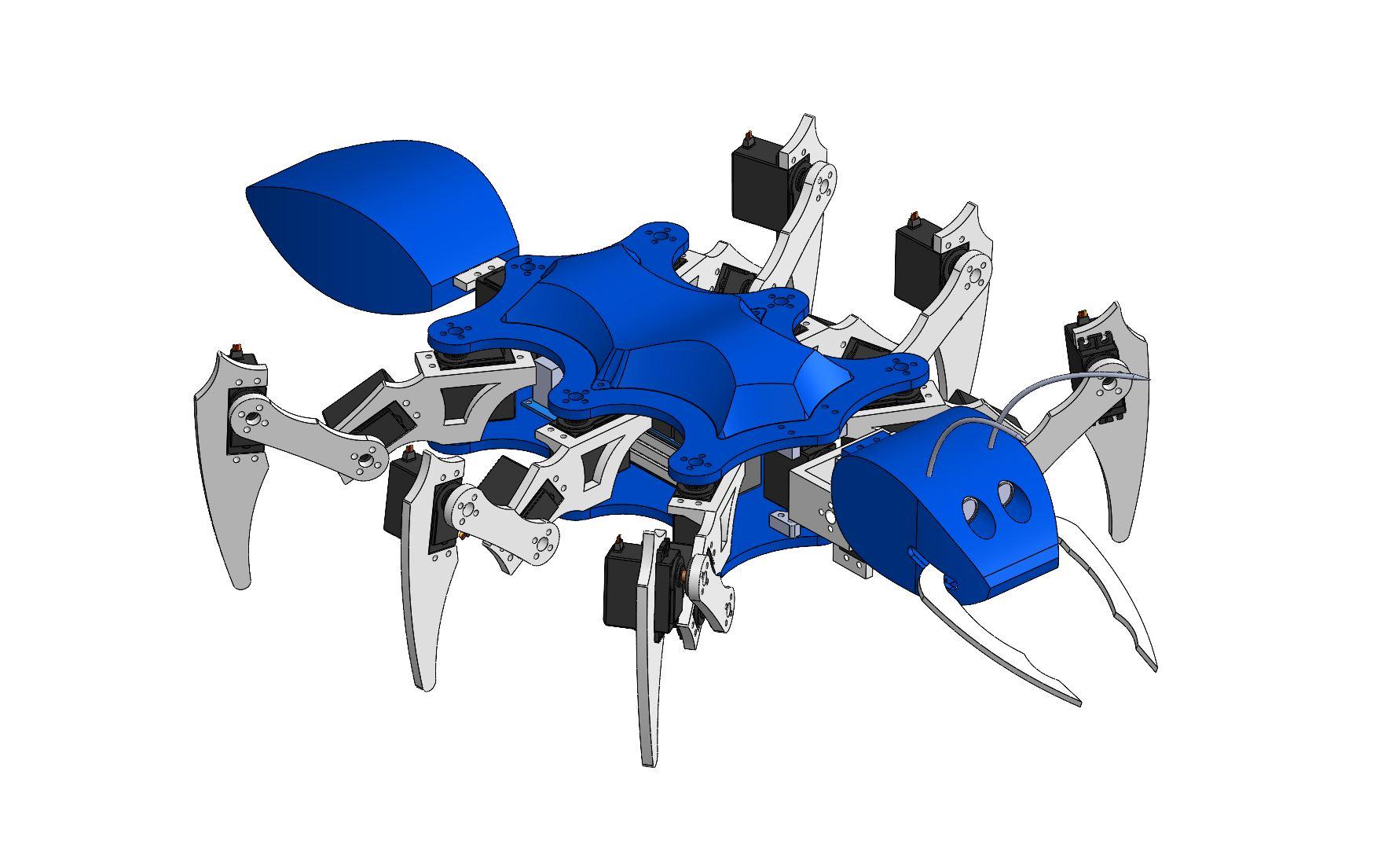
DIY Hexapod Ant Robot
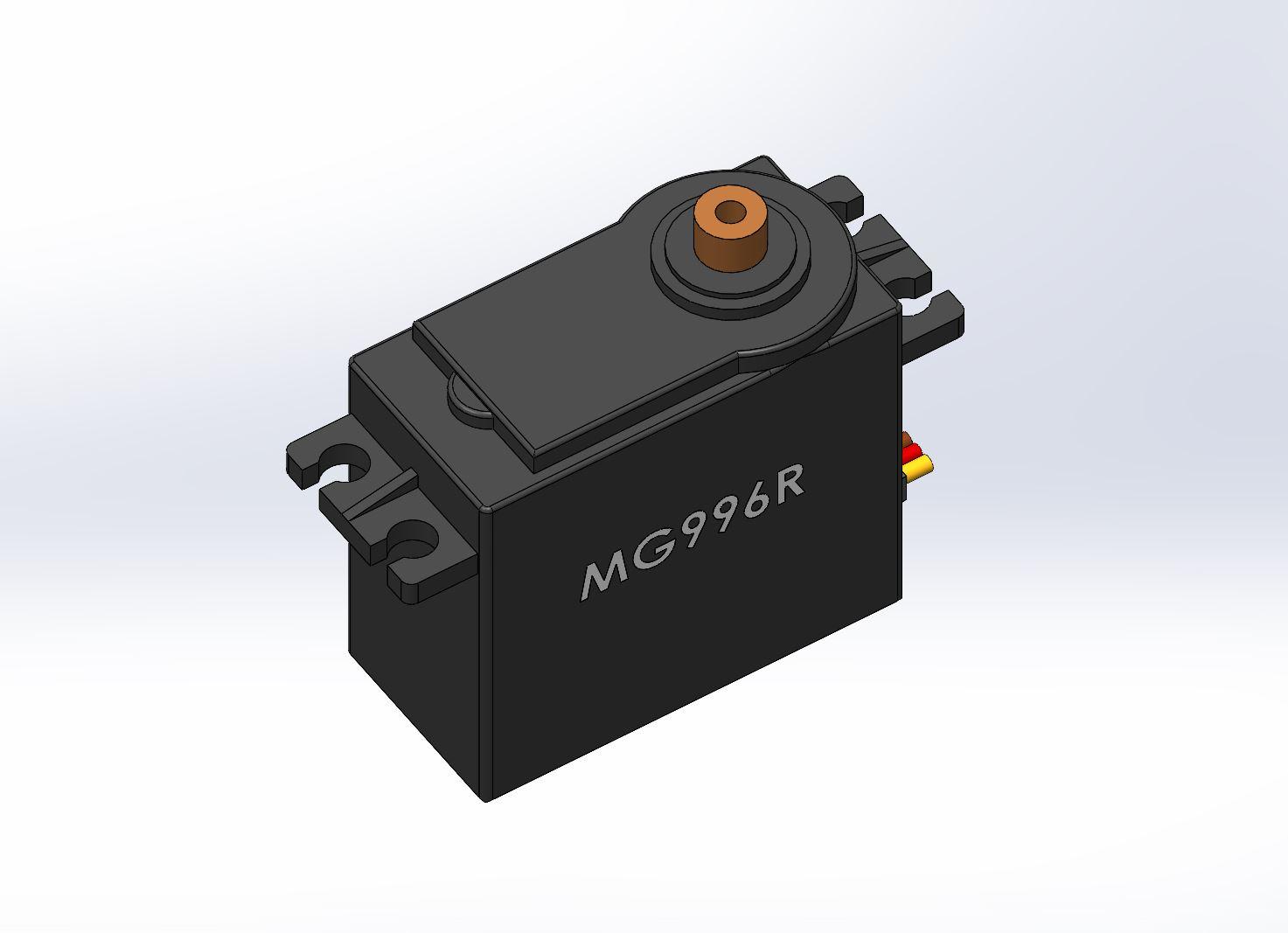
MG996R Servo Motor - 3D Model
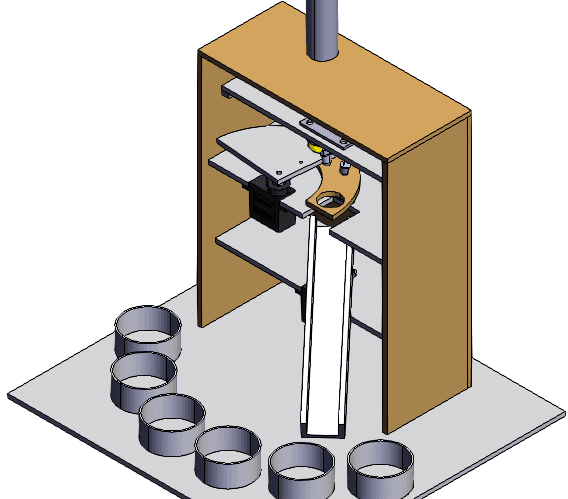
color sorter robot project-مشروع روبوت فارز ألوان

ERX-01 Scout Robot Crawler

CyberDeck V2

Animatronic Pickle Rick
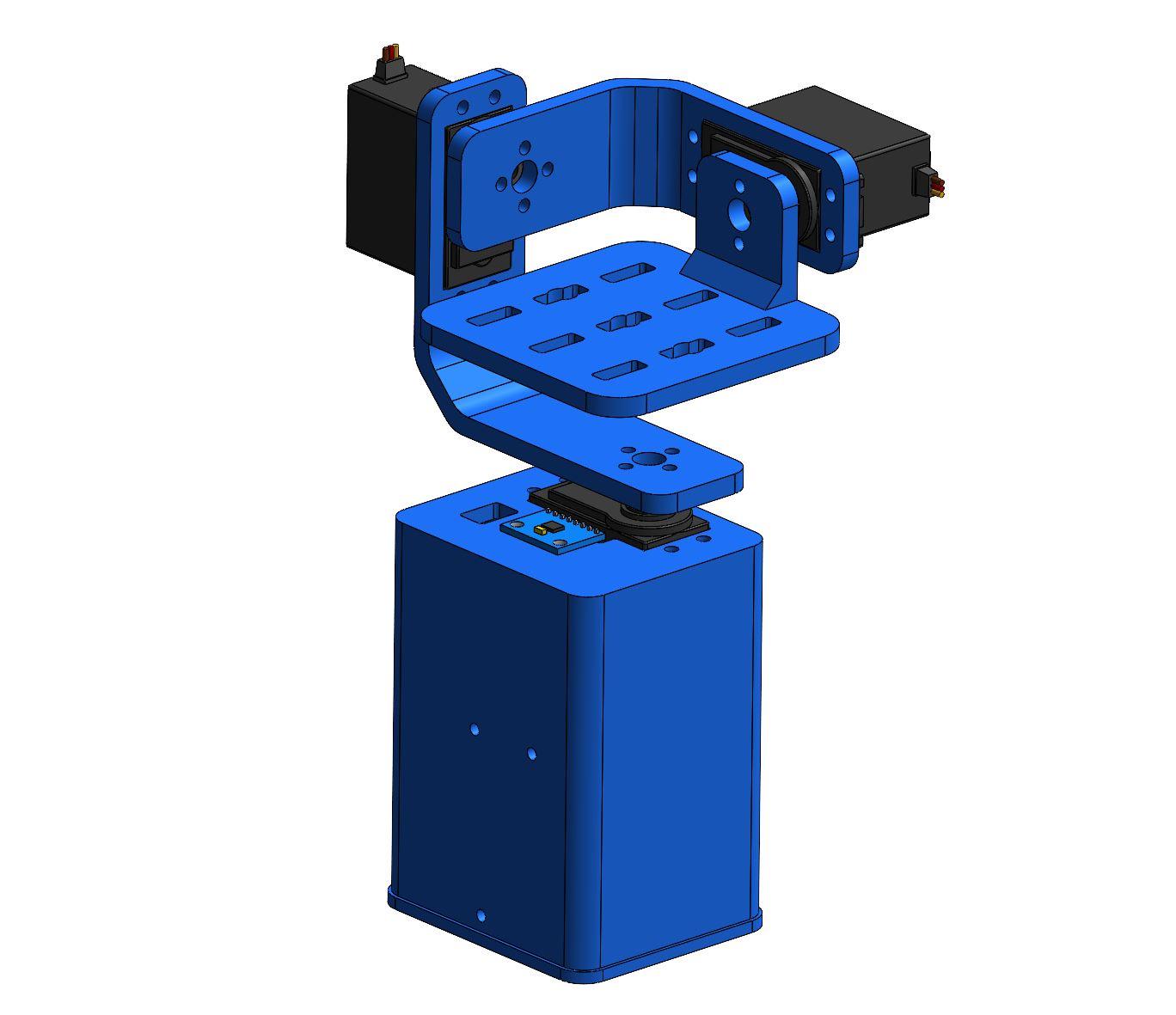
Self balancing platform
DM-S0020 2.1G Ultra-Micro Servo

Star Wars LED light

BlueTooth controlled car using L293D motor driver

FHW: Worker Bot Medic
Obstacle Avoiding Robot!

Animatronic baby Yoda

Simple animatronic eye
