
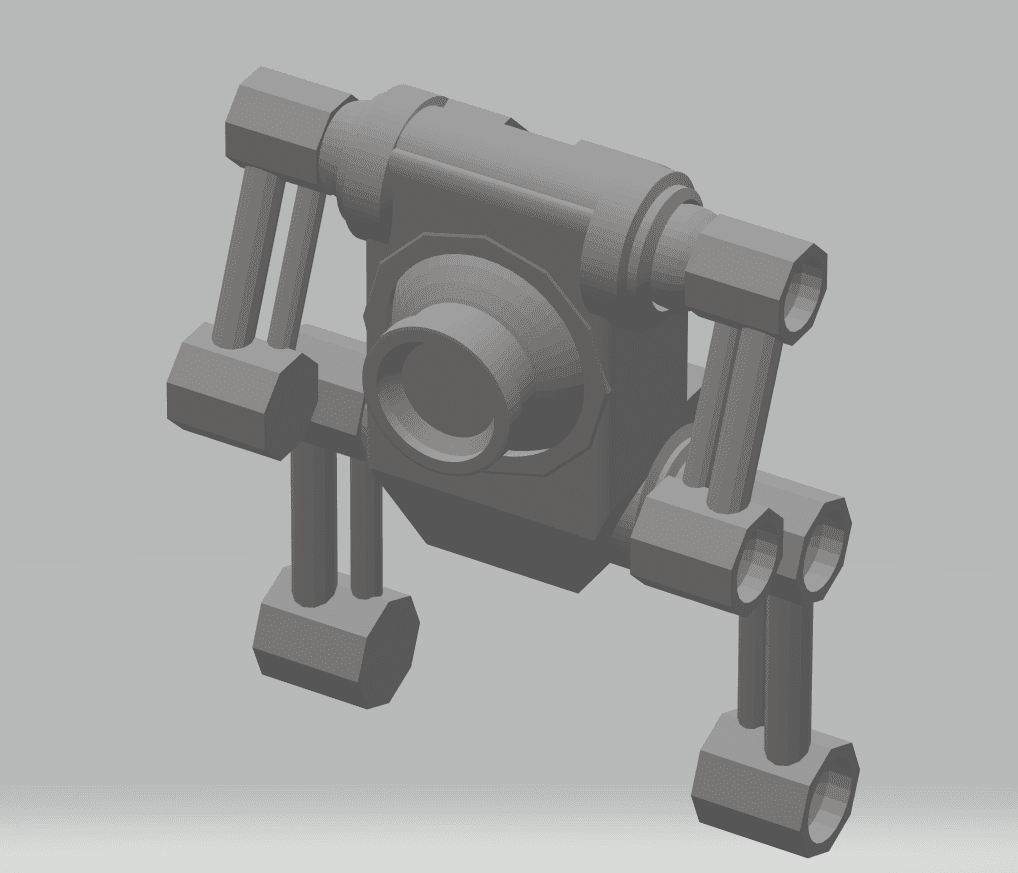
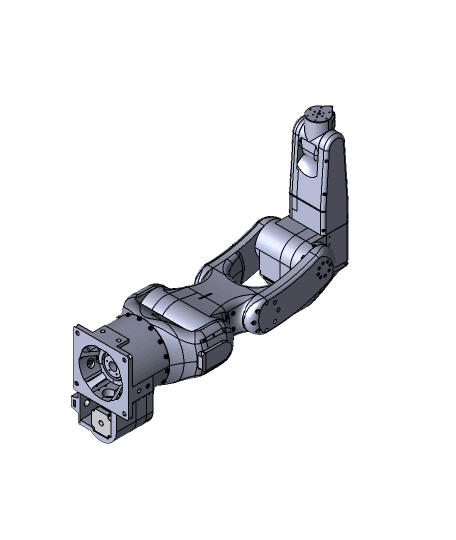
Simple Toy Robot Arm 5DoF
Model originally uploaded to Thingiverse at https://www.thingiverse.com/thing:4555965.
I've been wanting to create a fully actuated robot arm using print-in-place techniques for a while. Here is the first stage, a simple toy knocked up real quick like, sorry for the scad - it's a real hatchet job.
In future I'd like to progress to an improved version with elbow mounted pancake motors or similar leading onto a more precise version incorporating some kind of bearings (preferably common 608 type) and an anti-backlash mechanism (eg. spring).
At least this will give the kids something to play with as I iterate the design.
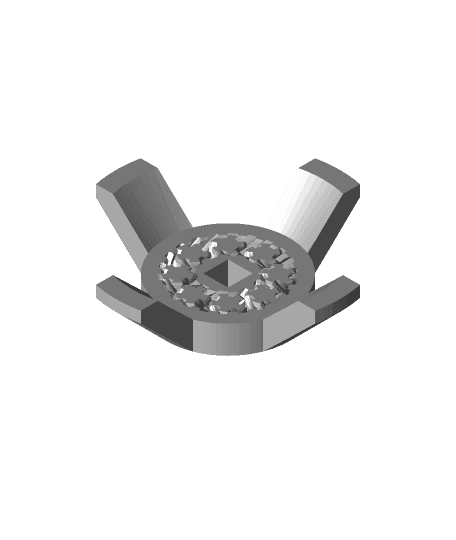
Similar to my previous gearbox designs, print at 0.2mm layer height and ensure there is a 1-layer gap in the ring gears after slicing. Use a sharpened spatula, razor or hobby knife to de-laminate the 1-layer gaps (watch fingers and listen for the "crack"), then turn the knob just a little to get the gears moving (these knobs are a little small, a 14mm socket might give a bit more leverage) taking care not to break the knob off, once you see a little movement, work it back and forth gently rather than apply more force. Now "crack" the jaws apart manually by back-driving by a few mm (there should be a little backlash) or give the elbow a tap with a rubber mallet. Now all the parts are free, it will be a bit stiff at first but opening and closing a few times will loosen it up. Then apply petroleum jelly or lubricant of choice to gears and work it in (again by opening and closing a few times).
Simple Toy Robot Arm 5DoF
Modular Toy Robot Arm

Flexi Storage Robot Toy

Car Dashboard , Cute Robot, Vibrating Robot , Toy for Kids , Print on place
Undefined Robotics Gyro Fidget Spinner Toy

Flexi Pink Robot Toy

Ready to Assemble Toy Robot
FHW: Robot Toy Concept #3

PrintABlok Ostrich Articulated Robot Construction Toy

Flexi Racing Robot Toy

Flexi Antenna Robot Toy
PAROL6 Desktop robotic arm

PrintABlok Wolf Articulated Robot Construction Toy

PrintABlok Fire Fox Articulated Robot Construction Toy
Simple Fidget Toy
simple toy boat

Fidget Robot Arm – Articulated Print-in-Place Model

Cymon Fully Posable Robot Toy
Faze4 3D printed robotic arm Model
PrintABlok Snail Articulated Robot Construction Toy
