



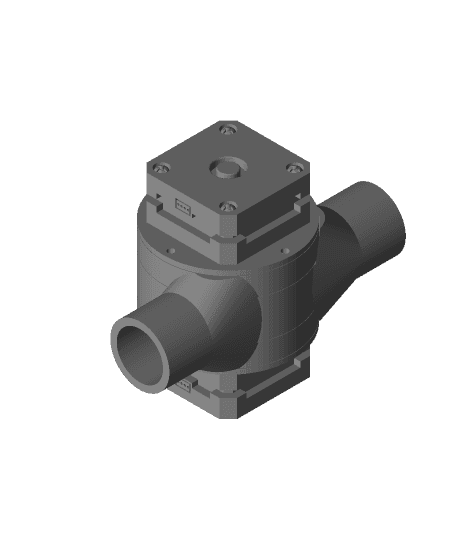
Planetary Roller Robot Actuator 44:1
An idea for a 44:1 robot actuator I'm cooking up. Split-ring compound planetary gear system which uses bearings instead of gear teeth to eliminate the source of the huge inefficiency typical of these gearboxes.
Should be able to print the ring gears in assembled positions. At 0.2mm layer height, a one-layer gap should separate them and be easily de-laminated post printing.
HK0306 Bearings and M3 steel dowel pins of 12mm, 18mm and 42mm lengths, some screws and a NEMA 17 stepper motor or two.
https://youtu.be/hEM9N223gk8 https://youtu.be/D-CN17TTPPo https://imgur.com/a/8dUUPnR https://imgur.com/a/gTzpcBx https://thingiverse.com/thing:5207977
Planetary Roller Robot Actuator 44:1 by tmackay is licensed under the Creative Commons - Attribution - Share Alike license.
Planetary Roller Robot Actuator 44:1
Planetary Roller Robot Actuator 44:1 and Hardware

Texture Rollers - Winter Vol. 1 (1-3)

Halloween Middle Rollers (1-3)

Halloween Wide Rollers (1-3)

Texture Rollers - Mandalas #1

Texture Rollers - Spring #1
Cutman - Megaman 1 - Robot Master - Figure and Miniature
Elecman - Megaman 1 - Robot Master - Figure and Miniature

Gutsman - Megaman 1 - Robot Master - Miniature
Bombman - Megaman 1 - Robot Master - Figure and Miniature

Gutsman - Megaman 1 - Robot Master - Miniature - Member Version

Texture Rollers - Ceramic Tiles #1
Roller Blinker 1 v1.stl

Texture Rollers Christmas middle #1

Texture Rollers - Nature Vol.1 (1-3)

Texture Rollers - Materials Vol.1 (1-3)

Texture Rollers - Dots Vol.1 (1-3)

Texture Rollers for Cosplay (1-3)

Texture Rollers - Stone Vol.1 (1-3)
this is ingenious
Brilliant reducer design, seems to be well suited to 3d print medium, have you tried to build the 3 or 4 ring version yet?