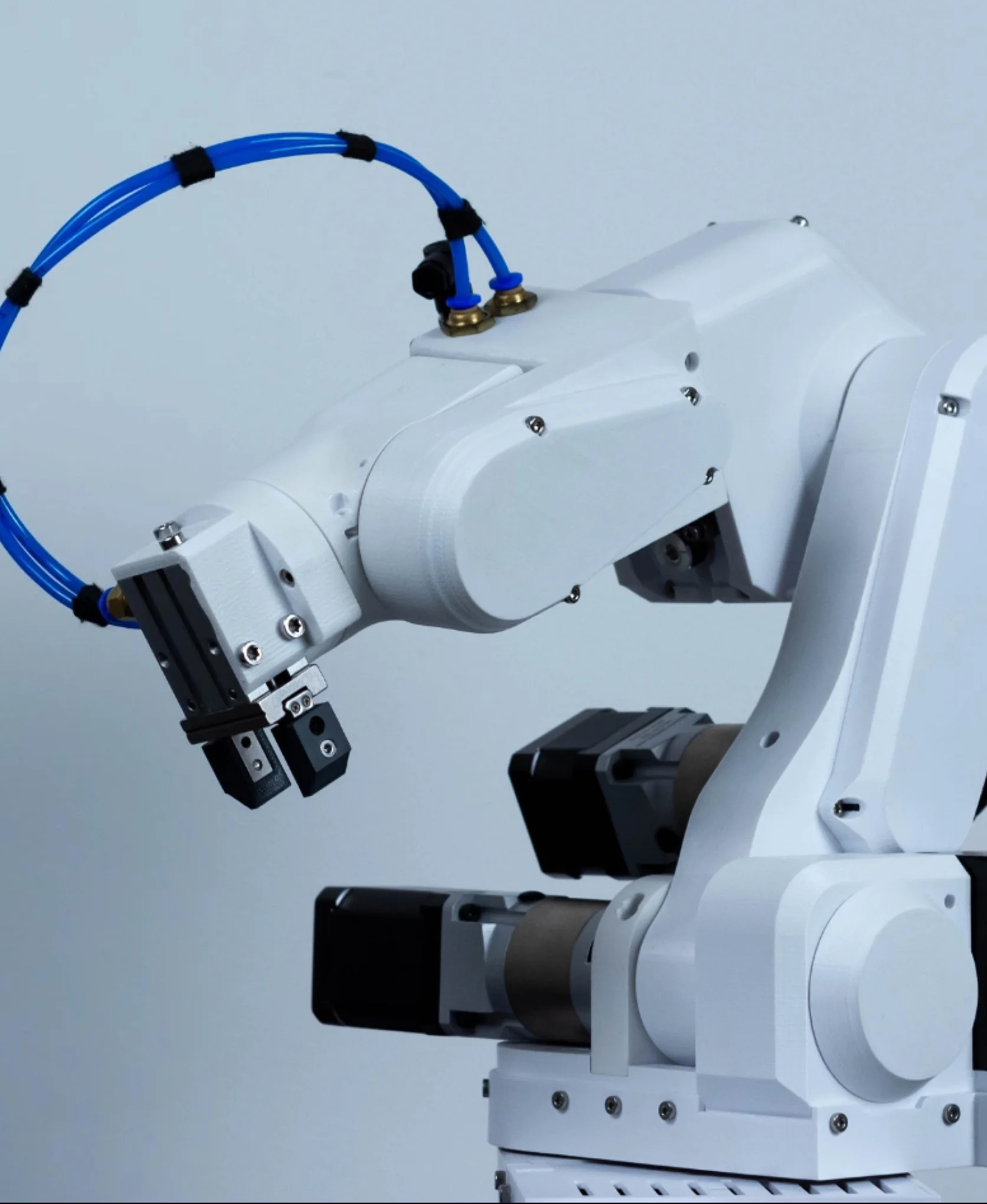


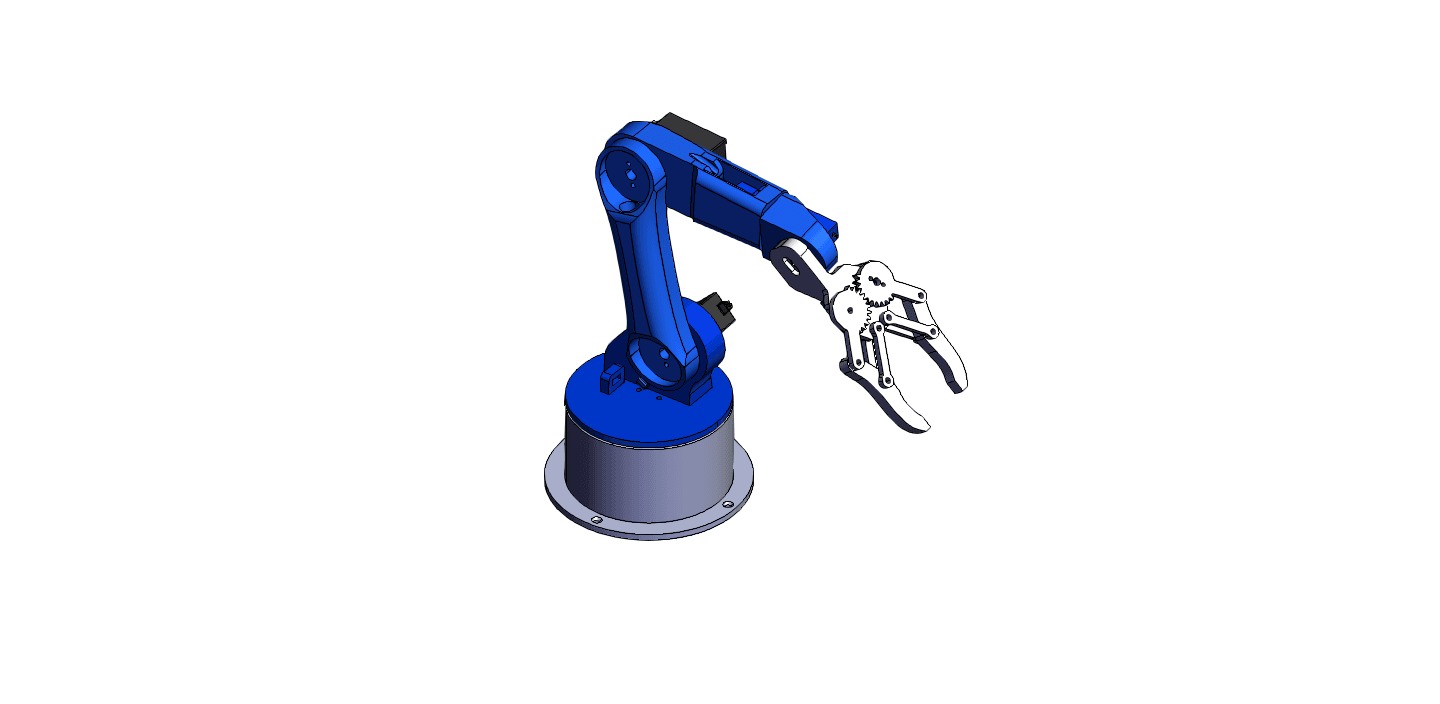
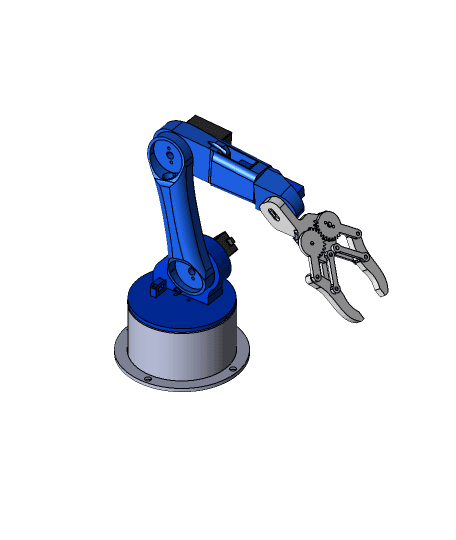
PAROL6 Desktop robotic arm
FOR THE MOST UP-TO-DATE ASSEMBLY MANUAL AND STL FILES GO TO GITHUB: Github: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm
PAROL6 is 6 axes desktop robotic arm. It is a robotic arm whose design approach is driven by real needs from a robotic education standpoint, small automation, and scaling from RnD to production. It is the culmination of devolvement and feedback of 2 previous robotic arms I made, both being very successful open-source projects. PAROL6 uses precision planetary gearboxes and belts with careful placement for optimal weight distribution. The design is modular and allows easy addition of closed-loop drivers. From the software side, it uses the custom protocol to allow for industry standard 60-100 Hz loop times. Modern GUI is inspired by industrial and cobot interfaces where all standard ways of control are implemented (resolved rate, cartesian level control, joint level control, motor jog...) It includes a simulator to test your programs without needing a physical robot. PAROL6 is feature rich with an Isolated I/O, CAN bus, and compliant gripper...
All information on how to build and how to use PAROL6 is on GitHub: https://github.com/PCrnjak/PAROL6-Desktop-robot-arm
Join discord: https://discord.gg/prjUvjmGpZ Join forum: https://discourse.source-robotics.com
Follow the project on youtube: https://www.youtube.com/@source-robotics
Follow the project on Instagram: https://www.instagram.com/source_robotics/
If you are interested in buying a kit or assembled robot send us an email on: Info@source-robotics.com
Support the project on: https://www.patreon.com/PCrnjak
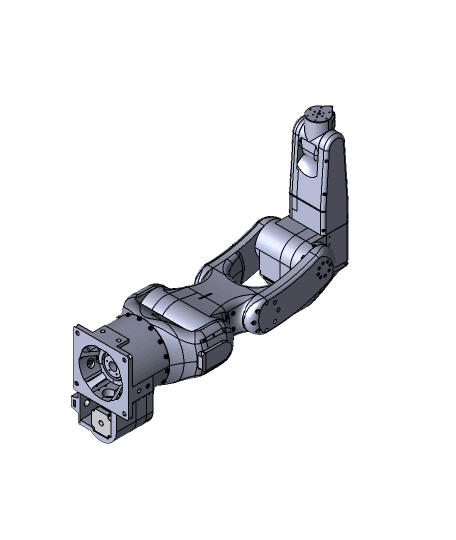
Faze4 3D printed robotic arm Model
Robot arm extension.SLDPRT

Robotic Arm
Faze4 3D printed robotic arm
Robotic Arm

ROBOTIC ARM V2
Arctos 3D printed robotic arm v0.13.step

Robot Arm Phone Holder
ROBOTIC ARM 3D PRINT
Robotic Arm 3D Model.STEP
Modular Toy Robot Arm
![Robotic Arm | By GTM Studios [FREE] 3d model](/_next/image?url=https%3A%2F%2Fstorage.googleapis.com%2Fproduction-thangs-public%2Fuploads%2Fenhanced_images%2Fv1%2F0d999d2f-29c9-433e-84c8-278a4e8d0e0d%2FScreenshot%2520from%25202025-07-19%252010-52-12.png&w=3840&q=75)
Robotic Arm | By GTM Studios [FREE]
robotic arm gripper assembly
Simple Toy Robot Arm 5DoF
Robotic Arm 3D Model
Robotic Arm 3D Model.stp
Robotic Arm 3D Model.STEP
robot arm 2.0
Robotic Arm
