
1 RAT tool brush.stl
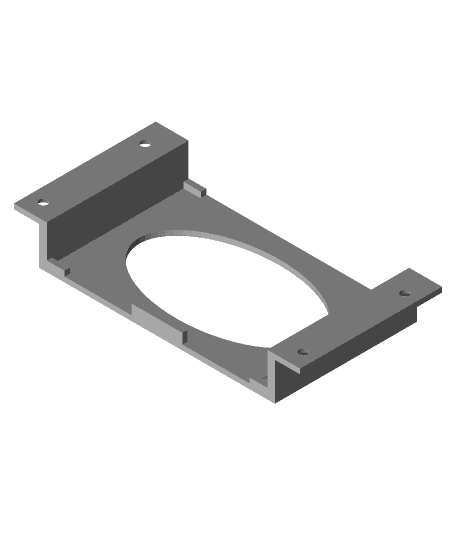
1 downloads · 4 years ago · Fits on the front of the robot arm, it does not interfere with the operation of the claws. Tool hold
Fits on the front of the robot arm, it does not interfere with the operation of the claws. Tool holder can be modified in Tinkercad to fit different sizes.
NASA_Viking_Tool_1_C
NASA_Viking_Tool_1

Cricut+tool+stand (1).3mf
.png&w=3840&q=75)
nut cracker tool box (1).stl

Friendship Bracelet Making Tool #1 | Basic bead pattern design planner & organizer for 25 beads

Sheet metal making tool for 1 in 35 scale models.stl

#1 Flange Tool 3D w/ PDF drawing | Fusion 360 | Pistacchio Graphic
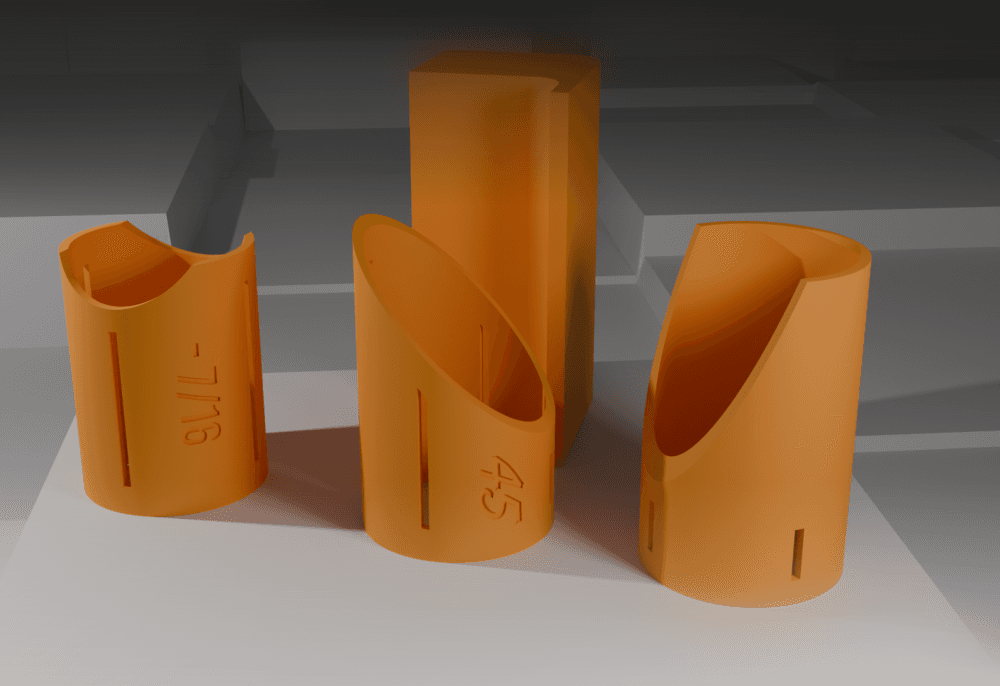
1 1/4" Sch 40 Pipe tools 45, cope, center

Hinged Glasses Case Style 1
Transcend P8 15 in 1 Mount

Stackable Organizer Assortment Box with Lid #1
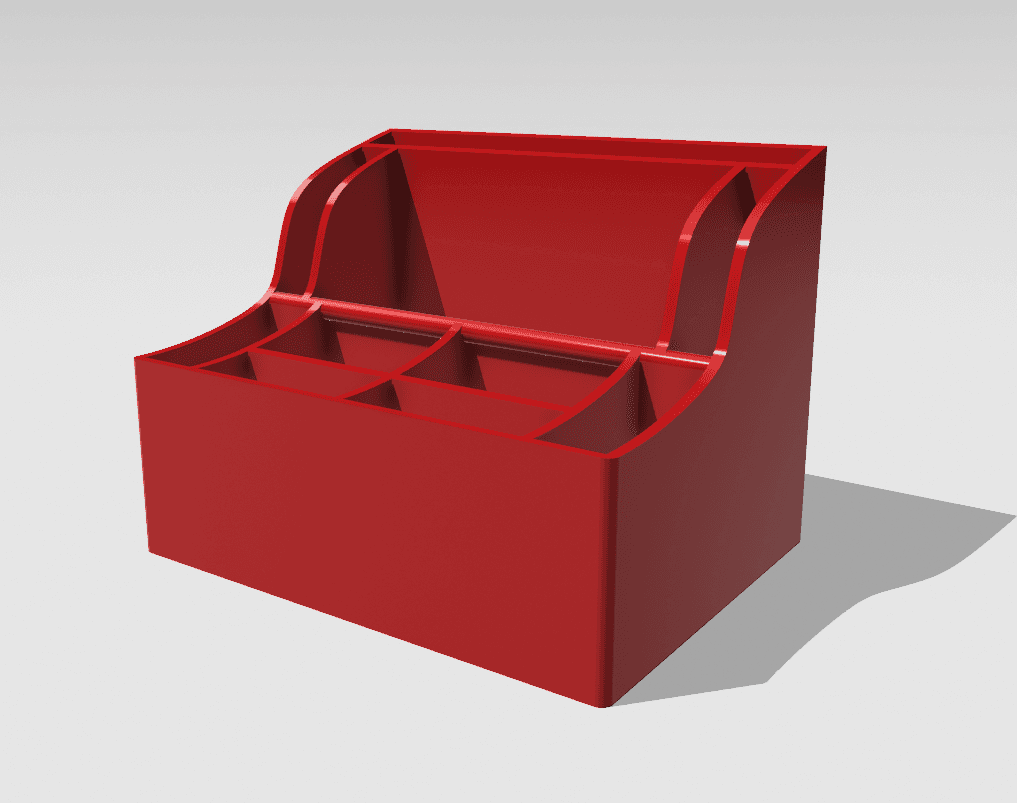
Desk organizer 1
All in one desk organizer (part 1)

Extension Cord Holder for Milwaukee Packout (Version 1)
.png&w=3840&q=75)
Sticky Note + Pen Holder Version 1
desk Organizer DD#1
Remix of 1x1x0·25, Push Fit, No Base Holes, 1 Divide

Bosch Flexiclick 5 in 1 Chameleon Organizer

1×1 Gridfinity UK Plug Holder
